No Casters at All: Using Camber for Self-Balancing Robots
Casters (or skids, or whatever) are used to balance the average two-wheeled differentially steered robot. But there are other methods for balancing two-wheeled bots. One is to use positive (tilting inward) and negative (tilting outward) camber to help provide balance without a “third wheel” on the front or back of the robot.
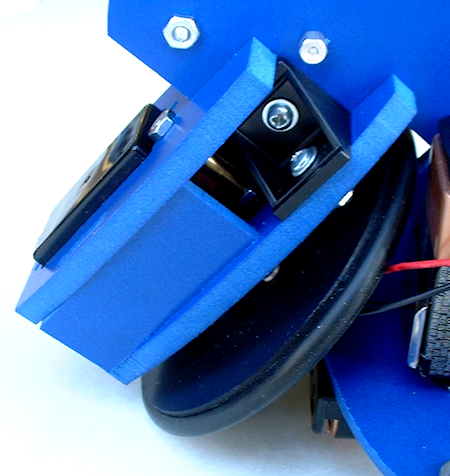
The two pictures below show the base of a robot that has its wheels set at a 35° angle. The robot also uses a very low center of gravity. The net effect is that the robot self-balances, except when it is forcefully pushed over or commanded to suddenly stop.
To prevent a total tipover, the bot has “training wheels” (actually small, round drawer handles) on the front and back. These ball-shaped skids normally don’t touch the ground, except as needed to prevent the robot from tipping over completely.

Another method costs more and is much harder to implement: one look at the Segway and you know that it’s possible to build a two-wheeled robot without a caster. Fully self-balancing robots can use the same techniques employed on the Segway to detect tilt and motion and, in turn, keep the body upright. You need an accelerometer and gyroscope, plus some math, to turn the motion data into precise motor control.
Self-balancing bots are beyond the scope of this book, but don’t let that stop you from experimenting with the concept. Do a Web search and you’ll find numerous projects that use this technique.