Managing the Weight of Your Robot
“He ain’t heavy; he’s my robot. . . .” Okay, so the old song lyrics don’t quite apply to robots, but the right sentiment is there. Weight is one of the most important factors affecting the mobility of a robot. A heavy robot requires larger motors and higher-capacity batteries—both of which add even more pounds to the machine. At some point, the robot becomes too heavy to even move.
The parts of a robot that contribute the most to its weight are the following, in (typical) descending order:
- Batteries
- Drive motors
- Platform (frame, body)
A 12-volt battery pack can weigh at least a pound; larger-capacity sealed lead-acid batteries can weigh 8 pounds. Heavier-duty motors will then be needed to move that battery ballast. Yet bigger and stronger motors weigh more because they must be made of metal and use heavier-duty bearings. And they cost more. Suddenly, your “little robot” is not so little anymore; it has become overweight and expensive.
Time to put your robot on a crash diet!
Weight, and Weight Distribution
Even a “lightweight” robot has some weight. The actual poundage itself isn’t as important as:
- The ratio of power to weight, that is, the ability of a robot with a given drive system to propel its own weight
- The distribution of the weight over the base of the robot
The ratio of power to weight is sometimes referred to as “weight budget.” Simply put, the power-to-weight ratio is the correlation between the amount of torque a robot’s drive system provides compared to the weight of that robot. Ideally, the ratio should be about even—the robot’s weight is well matched to its capacity to move itself.
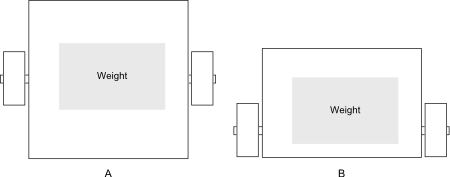
Weight distribution is often neglected, but it’s just as important. It is how the weight is placed on the base of the robot. For differentially steered robots, the most common weight distributions are shown in Figure 1. The weight is centralized over the drive wheels or support caster. Avoid situations where too much weight rests over a single wheel or off center relative to either the drive wheels or the caster. The robot may veer off course otherwise.
[Figure 1]
- For lighter robots, position the weight over the wheels to aid in traction. If there is insufficient weight over the drive wheels, they may slip when turning.
- For heavier robots, you can try different weight distribution arrangements to see which works best. Simply centering the weight over the base of the robot may be your best all-around choice.
- Excessive weight over swivel casters may inhibit the caster from “recentering” itself after a turn. If the caster fails to recenter, the robot will veer off course, as shown in Figure 2.
![]()
[Figure 2]
Position the Heavy Parts First
For the purposes of weight distribution, the motors and wheels, batteries, and caster(s) will represent the heaviest items. Since other aspects of the design of the robot base dictate the placement of the motors/wheels and caster, this leaves the batteries as the “ballast” you can use to help distribute weight.
When designing your robot, keep your battery-mounting options open. Place the other (and usually lighter) components around the batteries, once you have identified the best location for them.
Tips for Reducing Weight
If you find that your robot is too heavy, look first to the batteries. If you’re now using lead-acid batteries, consider NiCd (nickel-cadmium) or NiMH (nickel metal hydride) batteries instead. They weigh less. While NiCd and NiMH batteries may not deliver the same capacity as a lead-acid battery, your robot won’t weigh as much—and so may not require the same stringent battery ratings as you had originally thought.
If your robot really needs a lead-acid battery, does it need to be as large as the one you’ve initially picked? Could you exchange it for a smaller version?
Many of us select drive motors based on price and availability, not as much because they’re perfect for the robot. It’s not uncommon to use motors that are way oversized for the robot they’re used on. Motors that are grossly oversized will add unnecessary weight, and they will require larger (and, therefore, heavier and more expensive) batteries to operate. Consider changing out the motors for something more reasonably sized. Save the brutes for another project.
Is That Platform Too Heavy?
The platform is the frame or body of your robot, the part you attach the motors, batteries, and other parts to. As platforms get bigger (because you want room to grow) they can really pile on the pounds. An 18" square, 2-foot high robot constructed from extruded aluminum and plastic panels might weigh in excess of 25 pounds—without motors and batteries! The same robot in wood (of sufficient strength and quality) could weigh even more.
So with this in mind:
- Make your robot as small as it can be, without sacrificing your expansion options. Remember that materials to build a robot platform are relatively cheap. Don’t be afraid to start out small, then move to a larger platform if you outgrow it.
- Metal weighs more than wood, which weighs more than plastic. If you use a metal frame, pick the lightest materials your design allows for. If your robot doesn’t need 12-gauge steel (it’s not a combat robot, for example), use thinner aluminum sheets instead.
- If you’re going with plastic, consider expanded PVC. It weighs less than the same size platform in acrylic or polycarbonate and is much easier to work with.
- Go easy on the heavy metal brackets you bought from the hardware store. Exchange them for smaller versions, or use plastic ones.
- For smaller bots, use 4-40 hardware. Might be a bit harder to find, but it weighs less than the same number of screws and nuts in 6-32 or 8-32 size.
Constructiing Bots with Multiple "Decks"
One way to make physically smaller robots is to stack them up, like making a skyscraper. Good idea. A robot with multiple “decks” gives you added space for expansion, without making the footprint of the robot any larger. A 7" square robot with three decks has a total surface area of nearly 150 square inches—the equivalent of a 10" × 15" base—and that’s only including the tops of the decks.
But making multideck robots comes with some caveats and be-sure-tos. First, use the lightest weight support columns (called risers or standoffs in robo-building terms) that you can. Aluminum and plastic are better choices than solid steel.
Second, and most important, don’t go overboard in making a robotic version of the Leaning Tower of Pisa. Strike a balance (no pun intended) between the footprint and the height of your robot. Avoid overly tall robots in comparison to the square footage the base occupies on the floor.
Platform Sagging Caused by Weight
Some robots are so heavy they cause the platform on which they are built to “sag” in the middle. This can be a problem if the sag causes the wheels to bend outward, so they are no longer perpendicular to the ground. Instead, they bow out at the bottom and in at the top—this is called “negative camber.”
Depending on which robot tires you use, this can cause traction errors because the contact area of the wheel is no longer consistent. As even more weight is added, the robot may have a tendency to veer off to one side or the other.
There are four general fixes for this problem:
- Reduce the weight.
- Strengthen the platform (but this usually involves adding even more weight).
- Add cross braces to prevent the wheels from cambering (also adds more weight).
- Anticipate the wheel camber.
If you need to add bracing use the lightest materials you can. The cross brace made with lightweight aluminum tubing might work, or even try a wooden dowel. The tubing or dowel does not need to support any weight; it simply adds support against the sagging.
Round Robots or Square?
Robots can’t locomote where they can’t fit. Obviously, a robot that’s too large to fit through doorways and halls will have a hard time of it. In addition, the overall shape of a robot will also dictate how maneuverable it is, especially indoors. If you want to navigate your robot in tight areas, you should consider its basic shape: round or square.
- A round robot is generally able to pass through smaller openings, no matter what its orientation when going through the opening (see Figure 3). To make a round robot, you must either buy or make a rounded base or frame. Whether you’re working with metal, steel, or wood, a round base or frame is not as easy to construct as a square one.
- A square robot must orient itself so that it passes through openings straight ahead rather than at an angle. Square-shaped robot bases and frames are easier to construct than round ones.

[Figure 3]
While you’re deciding whether to build a round- or square-shaped robot, consider that a circle of a given diameter has less surface area than a square of the same width. For example, a 10" circle has a surface area of about 78" square. Moreover, because the surface of the base is circular, less of it will be useful for your robot (unless your printed circuit boards are also circular).
Conversely, a 10"-by-10" square robot has a surface area of 100". Such a robot could be reduced to about 8.5" square, it would have about the same surface area as a 10" round robot, and its surface area would be generally more usable.